语音识别の目录
- 一、科大讯飞平台下载开放包及语音验证
- 二、ROS环境下的语音识别与输出
-
- 1.ROS语音识别
- 2.ROS语音输出
- 3.ROS语音识别与输出
- 4.ROS语音交互
- 编写launch文件:打开语音识别节点和语音助手节点  在终端执行roslaunch robot_voice_824 voice_assistant.launch 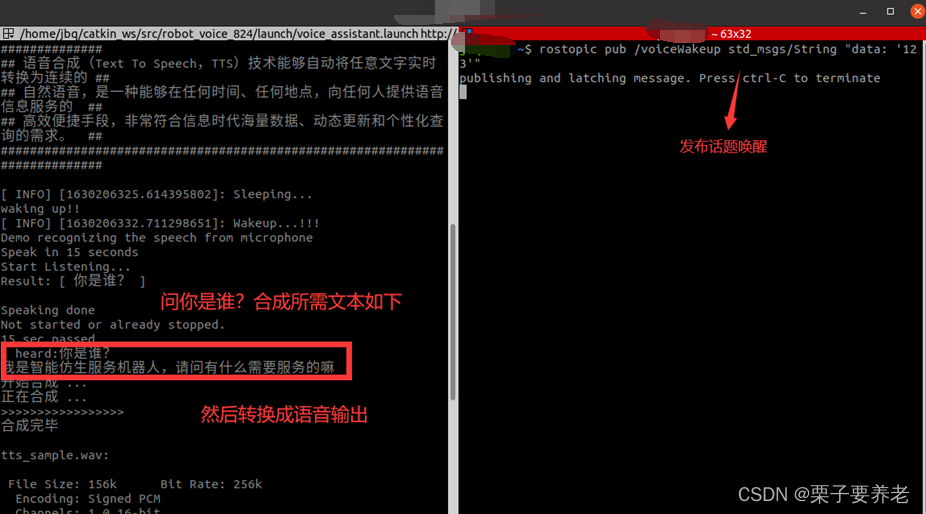
- 总结
一、科大讯飞平台下载开放包及语音验证
提示:本文针对的是语音识别中的语音识别(流式版)
讯飞平台:链接传送门
需要先注册账号,然后创建自己的应用才能够对开放包进行下载(每个开放包都有自己的APPID号,这个很重要!)
创建应用的界面

下载的包

将开放包下载到linux系统中

这是包中各个文件及其里面的内容

重点要用到的是samples里面的这些包

进入iat_online_record_sample功能包下,执行.sh脚本文件进行编译



二、ROS环境下的语音识别与输出
1.ROS语音识别
首先在工作空间下,建立语音识别的ROS功能包
工作空间如何创建?链接传送门

执行完指令后,框架如下,include包含科大讯飞程序的头文件,src包含引用科大讯飞接口的ROS代码



这块是不需要修改的。

主函数


代码块完成之后,就是对Cmakelist进行修改了

然后对工作空间下的robot_voice进行编译,也可以单独编译
![]()
最后进行语音识别的测试

2.ROS语音输出
把科大讯飞平台提供的语音输出功能包中的.c文件放到robot_voice_824/src文件夹中,并改名为tts_subscribe.cpp




subscriber:订阅/voiceWords话题接受输入字符串。
回调函数:使用SDK接口将字符串转换成语音。

修改Cmakelist
在该文件下添加以下编译规则:

最后是ROS语音输出编译

语音输出演示

3.ROS语音识别与输出
多节点,配置launch文件


4.ROS语音交互
每一个.cpp代表一个节点,创建语音交互的节点

在原来的回调函数中增加以下代码

保存cpp并在Cmakelist增加新的编译规则

catkin_make:编译语音相关功能包
编写launch文件:打开语音识别节点和语音助手节点

在终端执行roslaunch robot_voice_824 voice_assistant.launch

总结
以上就是关于科大讯飞语音识别SDK的ROS包修改。在资源里,有笔者现成的ROS功能包,直接在工作空间下,便能运行,但是需要注意APPID的修改。链接传送门
如有侵权,请及时与笔者联系。//抱拳